Let me be clear—something isn’t working with my program. However, I think the idea is solid. Also, by writing this I might be able to figure out my problem.
Two Forms of Angular Momentum
I’ll just just to the main point. I’m trying to make a connection between the two forms of angular momentum. The first is the point-particle definition. This says that the angular momentum of a point is defined as:
In this expression, L is the angular momentum, r is the position vector, and p is the linear momentum.
The other form of angular momentum is defined as:

Here ω is the angular velocity vector for a rigid object and I is the moment of inertia tensor.
Ok, let’s get started. I’ll begin with a simple case and move to more complicated stuff.
A free particle.
A particle has a mass m and moves with a constant velocity (no external forces). What happens to the angular momentum? Here is a python program for a free particle in which I also calculate the angular momentum. This is just a picture – you need to go here to run it.

Here is a plot of the z-component of the angular momentum in this case.

Notice that it’s constant. Oh, I assume you know about cross products—they are in vpython, so you don’t have to do it manually.
So, yes—angular momentum is conserved. No big surprise there. But what if you change the origin? Is angular momentum still conserved? Try it.
There is very little point looking at the moment of inertia. I’ll do that next.
Single object constrained to circular motion.
I want to get an object moving in a circle—but I don’t want to make some crazy constraint. This sounds like a job for THE SPRING. Yes, I will model an object moving in circular motion by using a spring attached to the object and some stationary thingy.
Here is the code. Here is what it looks like.

If you calculate the angular momentum (from the linear momentum), here is what you get.

It doesn’t look constant—but I think that’s just a rounding error. Reminder: this is the angular momentum from 
I can calculate the angular velocity as:

For objects moving about a fixed axis, the moment of inertia is a scalar value that is calculated as:

Notice that if you put these two definitions together, you get (essentially):

So it should work.
Two masses.
Using a stationary pivot point can cause some problems. Since the pivot point is stationary, there must be some external forces on the system. This means that calculating momentum and angular momentum can be difficult.
Here is the program. Here is what it looks like.
Yes, these are two unequal masses but the center of mass is stationary. Also, I will skip the graph, but angular momentum (the z-component) is constant.
Here is a different (but similar) version of the program in which I also calculate the moment of inertia version of the angular momentum. Everything seems to work—until it doesn’t.
What happens if the center of mass of the system is not zero? In this case, I need to redo the angular momentum calculation. First, for the point model, it would be still be r cross p, but I can write it two ways:

In this case, the 1r subscript means the position relative to the center of mass and the momentum relative to the center of mass. The com subscript means center of mass.
For the moment of inertia method, I have:

But this is where I will stop. For some reason, I can’t get a constant angular momentum using the moment of inertia. Here is the plot of the component of momentum for the case when the center of mass is moving.
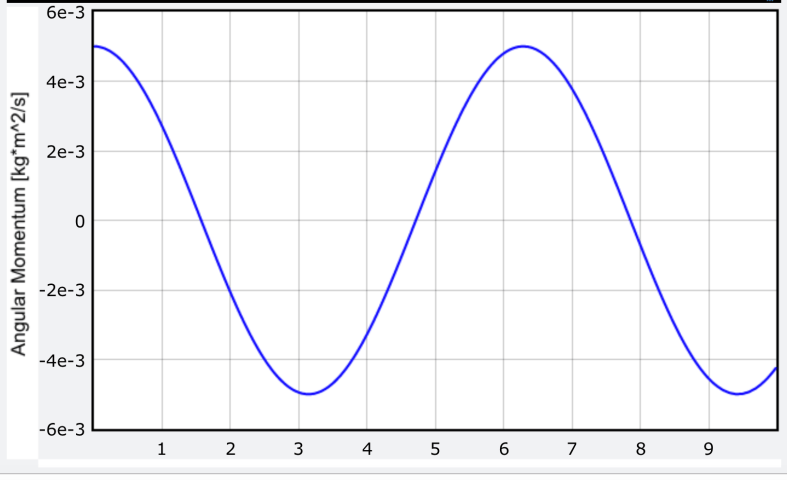
I feel like I am making some silly mistake. So, here are some notes and comments.
- Maybe I am calculating the relative velocity incorrectly.
- Maybe it has something to do with my definition of the angular velocity.
- Note that the two masses can have slightly different angular velocities since this isn’t actually a rigid object—it’s just mostly rigid (stiff spring).
- I feel like I have so many different programs, that I’m losing track of what works (that’s why I wrote this blog post).
- What’s the next step? Well, after getting this calculation to work—I have big plans. The ultimate goal is to have a 4 mass rotator (4 masses connected by springs) and calculate the moment of inertia and the angular momentum. I would be very happy if I could show that the angular velocity vector doesn’t have to be in the same direction as the angular momentum vector. That would be cool.

Consider your (very correct) formula for angular velocity. If you consider a system made of masses that aren’t points. Angular momentum becomes integral of (r^2*dm). cannot be removed from the integral unless it is uniform for all parts.