Season 3 finale—but don’t worry, MacGyver has been renewed for a 4th season. Boom. Now for some science.
Descender Device
MacGyver needs to get down an elevator cable—to do this, he builds a descender. The basic idea is to “grab” hold of the cable to produce enough friction that it supports a human. That keeps you from falling. Of course you also want to move down, there needs to be some method to “inch” your way down. The one MacGyver builds looks like this.

Here is an early sketch for a type of descender
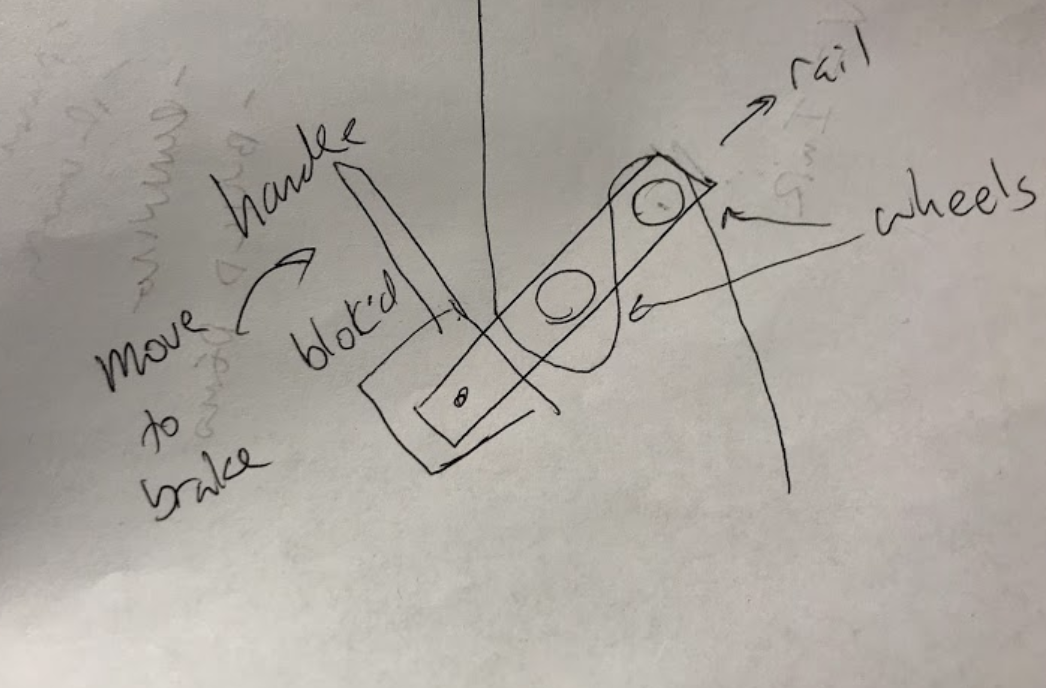
Of course the problem is that the elevator cable is under tension and very thick. It’s really more like a pole than a rope. That’s why the design in the episode would work better.
Two Bad MacGyver (Mason) Hacks
These aren’t bad hacks—they are hacks from the Bad MacGyver (Mason). First, there is the cable cutter. This is just a bolt cutter connected to an electric motor. That should work.
The other one is the hydrochloric acid in the basement of a building around support pillars. So, would this work? Well, hydrochloric acid does indeed dissolve concrete and cement—it’s not super fast though. Everyone likes to think of acid as being that kind in the movie Alien. It’s not like that.
Of course a pillar isn’t just cement. It has steel rods in there too. But acid will eat through steel as well—again, it just takes a while. But you don’t have to completely dissolve the pillars to cause destruction. Just making them weak could do the job.
Oh, it’s a good thing the hydrochloric acid is in plastic barrels. It would melt steel barrels.
Atwood Machine
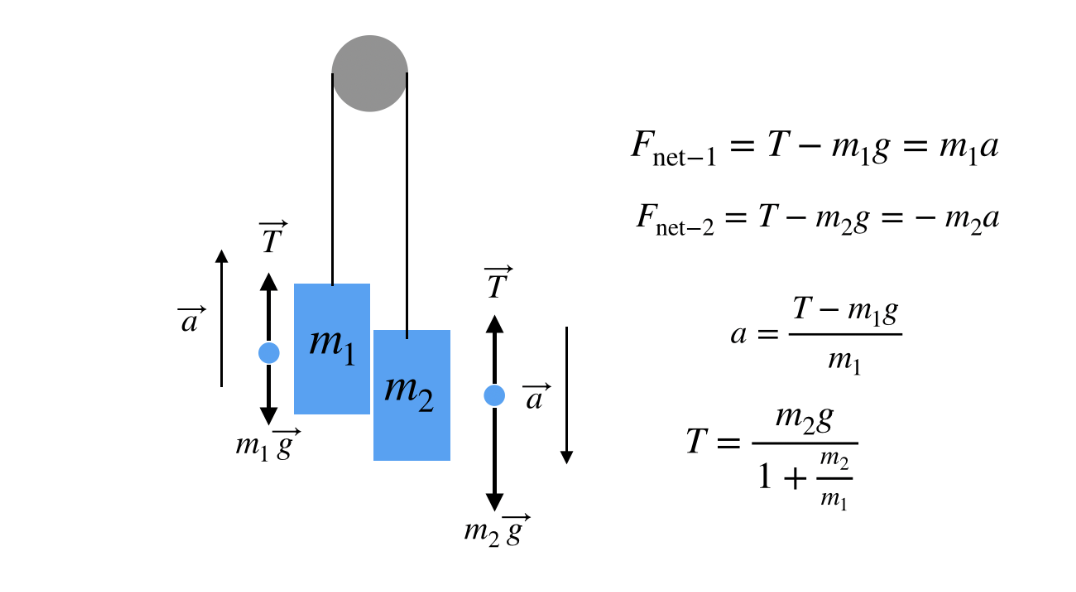
MacGyver’s plan is to connect one elevator to the one next to it. When the cable is cut, the two elevators will create an Atwood machine. This is of course a real physics problem.

The idea is to have two different masses connected by a string. This string then runs over a pulley. If the masses are different, the two masses will accelerate (one up and one down) with a constant acceleration. The key is that this acceleration will be much smaller than the acceleration of a free falling object. That’s a good thing since waaaaay back in the day, it was very difficult to measure the motion of an object with a large acceleration.
I think I will save the physics of an “Atwood Machine Problem” (no one really calls it that) for a later post. Instead, here is my calculation.
But wait! There’s more! This calculation would give you the tension in the cable, but once there is a tension the cable would stretch. How much the cable stretches depends on:
- Tension
- Cable length
- Cable diameter
- Type of material
So you see that the stretch really depends on two things—the material and the size of the cable. For the material dependence on stretch, we call this Young’s Modulus.
There is one more thing—maximum tension before a cable breaks. This also depends on the type of material and the shape of the cable. Here is a sample calculation.

Too bad MacGyver never got a chance to put these calculations into practice. Of course it’s Mason’s fault.
Recover Serial Number
It is possible to recover a serial number that’s scratched off a metal. Essentially, when the number is stamped into the metal there is a more than just a surface effect. The deeper metal is also changed in some way. Using acid, it’s possible show these differences and find this number. Yes, this is real.
For a circuit chip, the serial number is not likely to be stamped—it will be printed. Still, it’s entirely plausible that you could still recover some type of artifact.




 is the angle between r and F. This equation is equivalent to F-perpendicular times r or F times r-perpendicular.
is the angle between r and F. This equation is equivalent to F-perpendicular times r or F times r-perpendicular.
 is there to represent the weight of the human. But that gravitational force acts on the human, not the ladder. The ladder pushes UP on the human the same as the weight. Since forces come in pairs, an upward pushing force from the ladder means there is a downward pushing force from the human on the ladder. It’s equal to mg, but not mg.
is there to represent the weight of the human. But that gravitational force acts on the human, not the ladder. The ladder pushes UP on the human the same as the weight. Since forces come in pairs, an upward pushing force from the ladder means there is a downward pushing force from the human on the ladder. It’s equal to mg, but not mg. where
where  is the coefficient of static friction.
is the coefficient of static friction.



 since it only depends on the mass of stuff—but I don’t know
since it only depends on the mass of stuff—but I don’t know  . I’m going to need another equation. That’s where the sum of the torques comes in.
. I’m going to need another equation. That’s where the sum of the torques comes in. 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}